SOMMAIRE
Les Moteurs pas à
pas :
Les
moteurs à réluctance variable
Les moteurs bipolaires
Les moteurs
unipolaires
La commande des moteurs pas à pas :
Les circuits
spécialisés
Le
circuit intégré TEA3717
Le
circuit intégré MC3479C
Les
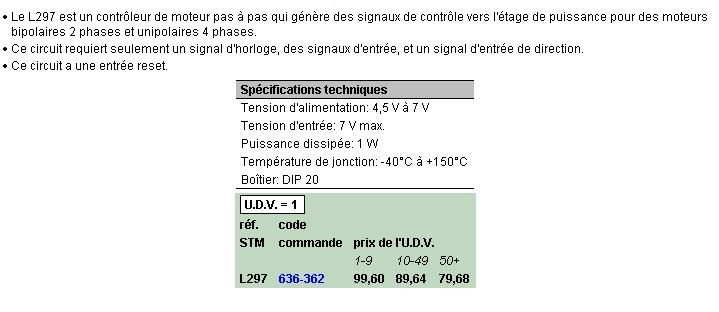
circuits intégré L297 et L298
Annexes
Différents
type de moteurs pas à pas
Spécification
du L297
Spécification
du L298
Les moteurs pas à pas se divisent en deux catégories :
il peut avoir une valeur comprise entre 0,9° et 90°. Les valeurs les plus couramment rencontrées sont :
Les moteurs récupérés dans le matériel
informatique ne présentent pas un couple important (quelques dizaine
de grammes par cm), et il conviendra dopérer, à laide de
pignons, une réduction de la vitesse de rotation afin den augmenter
la force.
Les moteurs à
réluctance variable
Un moteur à réluctance variable possède
un rotor en acier doux non magnétique. Ce rotor est constitué
dun nombre de pôles supérieurs à celui du stator.
La figure 1 représente le schéma simplifié dun tel moteur pas à pas. Ce dernier se commande à la façon dun modèle unipolaire, en alimentant une paire de pôles du stator afin daligner les pièces polaires du rotor avec les enroulements alimentés. Trois séquences pour lalimentation des phases peuvent être utilisées :
2 C
3 B
4 D
2 CB
3 BD
4 DA
2 AC
3 C
4 BC
5 B
6 BD
7 D
8 DA
Le schéma électrique dun moteur bipolaire
est donné en figure 3. Il est
bien entendu simplifié et son angle de rotation par pas est ici
de 90°.
La constitution de ce type de moteur est la suivante :
Un aimant permanent est solidaire de laxe du moteur et
sa rotation seffectue entre les différents pôles du stator
supportant les enroulements. Ces derniers devront être alimentés
par un courant changeant de sens à chaque pas effectué, selon
les trois séquences suivantes :
1°/ Mode " monophasé "
La première séquence ne réclame que
lalimentation dun seul enroulement à chaque pas. Le couple développé
par le moteur nest pas très important. Le schéma de la figure
4a montre la chronologie à respecter.
On alimente :
CD
BA
DC
AB
La seconde séquence est obtenue par lalimentation
simultanée des deux phases. Cest le procédé le plus
courant et celui qui donne le couple maximum. On se reportera en figure
4b afin de comprendre ce type de commande.
3°/ Mode demi-pas
Cette troisième séquence est représentée
en figure 4c. Là, le moteur
est commandé en biphasé, puis en monophasé, puis en
biphasé, etc. On arrive ainsi à doubler le nombre de pas
dun moteur et à augmenter sa précision.
Malheureusement, le couple est évidemment irrégulier.
et la commande électronique de ce type de moteur est plus complexe
si on veut la réaliser à laide de transistors. En effet,
le courant devant être inversé, un pont de quatre transistors
par phase doit être utilisé, comme représenté
en figure 5. On peut également
nutiliser que deux transistors, mais dans ce cas, une alimentation symétrique
sera nécessaire (figure 6).
Le schéma théorique dun moteur unipolaire
est donné en figure 7.
On peut considérer que ce type de moteur est identique au moteur bipolaire, à une différence prés :
afin dinverser le sens du courant, les enroulements sont réalisés à laide de deux fils dont lune des extrémités est relié à la masse (ou au plus de lalimentation).
Il suffit alors dalimenter les enroulements à tour de rôle afin dobtenir la rotation de laxe du moteur, et selon la même séquence vue pour le moteur à réluctance variable.
Un moteur unipolaire présentera, à dimension
équivalentes, un couple moins important quun moteur bipolaire.
La commande dun moteur pas à pas unipolaire ne nécessitera
que quatre transistors NPN qui seront commandé à tour de
rôle, par exemple, à laide de porte logiques.
Le dessin de la figure 8
représente les modes de commande schématisés pour
les deux types principaux de moteurs.
Pour conclure cette brève description, signalons que ces moteurs (bipolaires et unipolaires) ne peuvent présenter des vitesses de rotation très élevées. Cette limitation est en grande partie due à la tension induite par le rotor dans le stator et produisant une force contre-électromotrice. Si lon désire des vitesses supérieures, il conviendra dutiliser les moteurs à réluctance variable, dont le rotor est, comme nous lavons dit plus haut, en fer doux non magnétique, et qui ninduit donc pas de tension dans le stator.
La commande des moteurs pas à pas :
Les circuits intégrés spécialisés
Il est facile, comme nous le verrons dans les pages suivantes consacrées aux montages pratiques, de réaliser une commande électronique de moteur pas à pas à laide de commande de composants discrets :
Des transistors de puissances commandés par des portes logiques avec un dispositif de limitation de courant. Mais il est encore plus simple dutiliser des circuits intégrés spécialisés, circuits ne nécessitant que quelques composants externes et simplifiant au maximum lenvoi des séquences de commande. Ils disposent en outre de toutes les fonctions telles que le sens de rotation, le mode demi-pas, la mise en haute impédance des sorties (moteur libre), etc.
Nous vous proposons maintenant la présentation
de quatre dentre eux, choisis parmi les plus utilisés, et donc
facilement disponibles. Cette présentation permettra une mise en
uvre facile des circuits présentés.
Caractéristiques générales :
Le circuit est destiné à la commande dun
enroulement dun moteur pas à pas bipolaire. Il convient donc dutiliser
deux circuits afin de piloter le moteur. Il comporte en interne deux entrées
compatibles T.T.L., un palpeur de courant, un monostable et un étage
de sortie à quatre transistors protégé par des diodes.
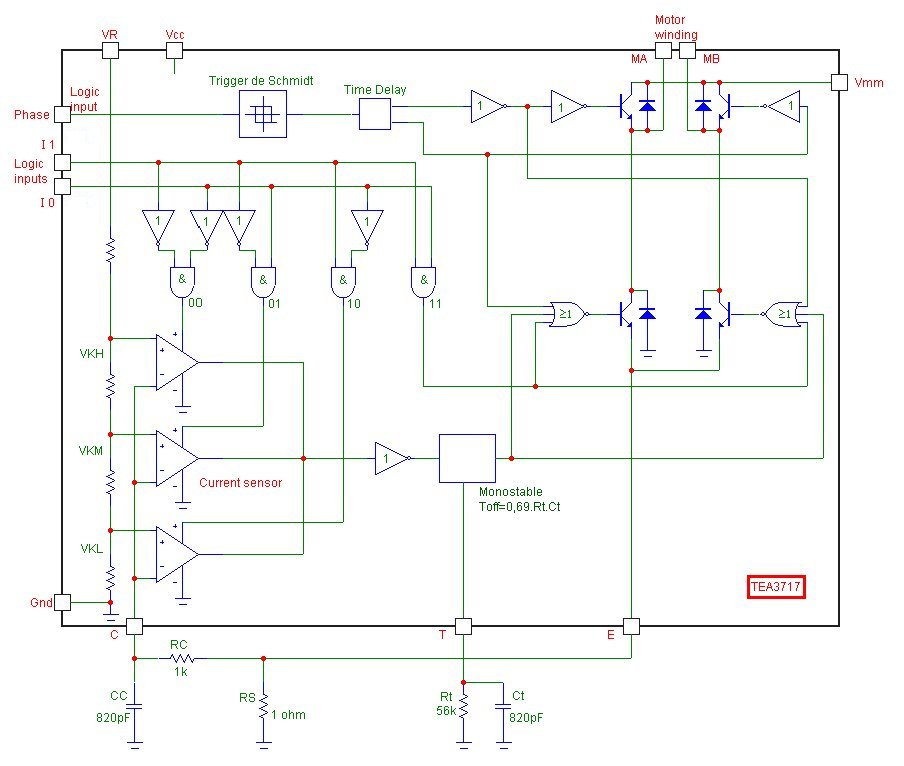
Le schéma de la figure 10 représente la constitution interne du circuit intégré et indique les composants externes à câbler pour sa mise en uvre.
Deux circuits seront à réaliser afin dobtenir une commande complète. Les entrées logiques I0 et I1 permettent de déterminer le courant du pont de sortie par commutation des trois comparateurs internes :
I0 I1 NIVEAU DU COURANT
H H annulation du courant de sortie
L H courant faible
H L courant moyen
L L courant maximum
La valeur du courant traversant le bobinage du moteur dépend également de la valeur de la tension de référence appliquée sur lentrée VR et de la valeur de la résistance RS (du palpeur de courant). Ce palpeur de courant, outre la résistance RS, est constitué dun filtre passe-bas et de trois comparateurs. Seul lun de ces derniers peut être actif dans le même temps.
La limitation de courant fonctionne de la façon suivante :
Le courant traversant lenroulement du moteur traverse
également la résistance RS.
Lorsque le courant a augmenté de telle sorte que la tension aux
bornes de la résistance devient supérieure à la tension
de référence appliquée sur lune des entrées
du comparateur sélectionné, la sortie de ce dernier passe
à létat haut ce qui enclenche le monostable. Le courant
est alors annulé durant une durée fixe appelée Toff.
Cette durée est donnée par la formule :
Toff=0,69.Rt.Ct
Lorsque la durée de fonctionnement du monostable
est achevée, sa sortie repasse à létat bas et le
courant est rétabli dans lenroulement du moteur jusqu'à
un nouvel enclenchement. Létage de sortie est constitué
de quatre transistors darlington connectés en pont. Les deux transistors
qui seront commutés alimenteront lenroulement du moteur, lui délivrant
un courant constant.
Le circuit intégré MC3479C
permet le pilotage dun moteur pas à pas bipolaire. Un seul circuit
est nécessaire. Il est constitué de quatre entrées
(au standard T.T.L.) de sélection commandant un circuit logique.
Ce circuit pilote deux drivers de puissance auxquels sont connectés
les deux enroulements du moteur bipolaire. Le dessin de la figure
11 représente le schéma interne du MC3479C
ainsi que son brochage.
Ses principales caractéristiques sont les suivantes :
Bien que conçus afin de fonctionner conjointement, ces deux circuits peuvent être utilisés séparément.
Le circuit intégré L297, dont le schéma interne est donné en figure 12, simplifie notablement la commande dun moteur pas à pas. Le cur de ce circuit es un bloc appelé translateur qui génère les séquences dalimentation des différentes phases du moteur, en demi-pas, en pas entier une phase et en pas entier deux phases.
Ce translateur est commandé par deux entrées logiques :
Le sens de rotation (CW / CCW) et
le mode de fonctionnement en demi-pas ou en pas normal (Half / Full).
Une troisième broche est lentrée CLOCK
qui permet lavance dun pas vers le suivant. Le translateur contient en
interne en compteur à trois bits et quelque circuits logique qui
permettent de générer une séquence basique de huit
pas, comme représenté sur la figure
13.
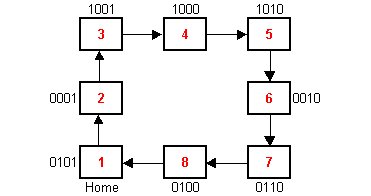
Les trois séquences de commande citées plus haut peuvent être facilement obtenues à partir de cette séquence de base.
Le circuit intégré L297 possède quatre sorties de commande des étages de puissance, ainsi que deux sorties supplémentaires dinhibition de ces étages (lorsquil est utilisé avec le L298). Ces deux sorties sont commandées par une logique interne elle-même déclenchée par deux comparateurs.
Ces deux comparateurs mesurent la valeur de la tension
présente aux bornes de deux résistances due au courant traversant
les enroulements du moteur. Lorsque la valeur de cette tension dépasse
celle de la tension de référence, lalimentation du moteur
est coupé jusquà ce que la valeur du courant diminue. Nous
avons vu ce type de fonctionnement dans la description du TEA3717.
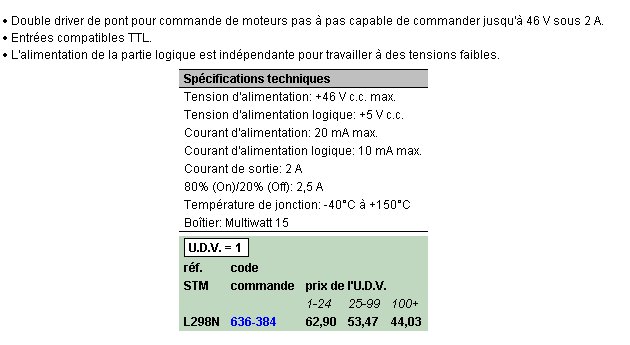
Le circuit intégré L298 contient deux étages de puissance configurés en pont, chacun commandé par deux entrées logiques (A, B et C, D) ainsi que deux entrées de validation (INH1 et INH2). De plus deux broches sont connectées en interne aux émetteurs des transistors (paires inférieures) qui permettent la connexion de résistances palpeuses de courant.
Le schéma interne du L298
est donné en figure 14.
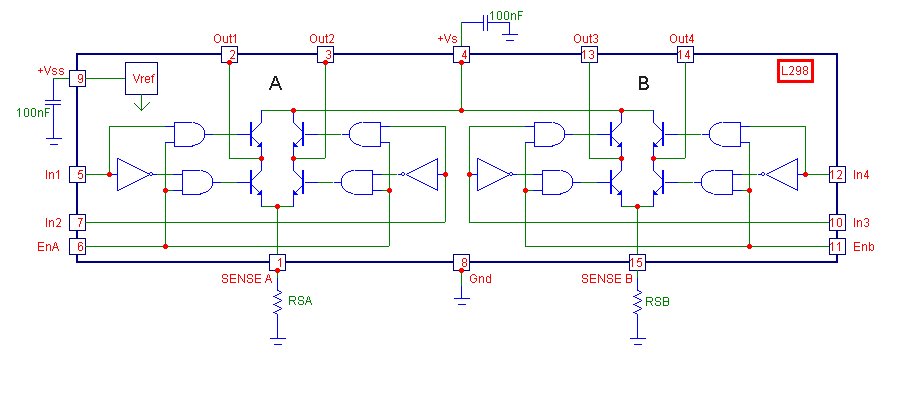
Celui-ci permet de disposer dun courant important (2,5A) sous une tension élevée (46V). la puissance obtenue peut ainsi atteindre environ 200W, ce qui permet lalimentation de moteurs puissants présentant des résistances de bobinage faibles. Il va sans dire que dans ce cas, le circuit devra être fixé sur un dissipateur thermique de dimensions convenables.
Comme on le constate sur le schéma, le L298 possède deux broches dalimentation :
Lune pour le moteur (Vs) et
Lautre pour la logique interne (Vss, +5V)
Ce qui permet de limiter la dissipation du boîtier.
Il est à noter que, contrairement à la majorité des circuits, le L298 ne contient pas les diodes de protections des transistors internes. Il conviendra donc de les câbler à lextérieur du boîtier. Ces diodes devront présenter des temps de commutation faible et devront être capable de laisser passer un courant important.
Le L298 est présenté en boîtier MULTIWATT à 15 broches, ce qui simplifie sa fixation sur un refroidisseur.
Différents type
de moteurs pas à pas :